Robotics in food service has spent two decades promising more than it delivered. The arrival of foundation models trained for physical manipulation is changing the underlying reason why: the limiting factor was never the hardware.

For the better part of two decades, the promise of robotic automation in food service environments occupied a peculiar position in the industry’s imagination: widely anticipated, occasionally demonstrated, and persistently absent from the operational reality of most commercial kitchens. The demonstrations that periodically surfaced at trade conferences were technically impressive but commercially thin: systems that performed reliably in controlled conditions but degraded under the sensory and physical noise of a real restaurant operating at full capacity. The consistent pattern of underperformance pointed to a structural limitation that hardware improvements alone were never going to resolve. What was missing was not a stronger arm or a more precise gripper. It was a form of intelligence sophisticated enough to make decisions about objects and situations that the system had not been explicitly prepared for and to make those decisions fast enough and reliably enough to be worth deploying commercially. That particular capability now has a name in the research community: embodied AI flexible manipulation. And the question of whether it has finally matured enough to deliver on what earlier robotic generations could not is one that a cohort of emerging food robotics companies is actively testing in real commercial deployments.
AtomBite.AI is an artificial intelligence application company building the AtomBite Brain: a foundation model for flexible manipulation in commercial robotics. Operating within the still-nascent but rapidly developing intersection of large language model research and physical robotics deployment, the company represents a specific theory of how the transition from laboratory embodied AI to commercially viable food automation will actually unfold. Understanding that theory requires understanding both the technical evolution that has made it possible and the persistent gaps in prior automation approaches that it is specifically designed to close.
The Founders and Their Formative Operational Context
AtomBite.AI was founded in San Francisco by three individuals whose professional histories converge on a sharchief technology officert high-volume logistics operations demand from any technology system claiming to improve them. Dr. Dong Wang, who leads the company’s technical direction, previously served as Chief Technology Officer at Meituan Delivery, the Chinese food platform that became a canonical case study in the application of algorithmic intelligence to large-scale, real-world logistics. At Meituan, Dr. Wang encountered the limits of rule-based coordination systems at a scale that few organizations anywhere have matched; the experience of watching deterministic algorithms fail in the presence of real-world variability shaped his conviction that the next generation of physical automation would require fundamentally different architectural principles.
Dr. Tao Li, who served as an algorithm expert at Meituan before co-founding AtomBite.AI built his expertise in the training infrastructure that underpins physical AI systems: data pipelines, model architecture choices, and the evaluation frameworks that determine whether a manipulation model is actually ready for production deployment rather than just impressive in demonstration. His presence on the founding team addresses a challenge that has historically been as significant as any hardware limitation in food robotics: the difficulty of building training datasets that are diverse and realistic enough to produce models that generalize reliably to the long tail of scenarios a real kitchen generates. Steven Li, a Forbes China 30 Under 30 honoree, contributes the commercial and operational perspective that translates technically capable systems into viable products within an industry that demands clear and near-term economic justification for any new operational investment.
What Embodied AI Actually Means: A Technical Grounding

The term embodied AI describes a class of artificial intelligence systems that do not merely process symbolic or linguistic information but exist and act within a physical environment. An embodied AI system perceives the world through sensors, forms representations of its current state and the state of objects around it, and selects physical actions intended to achieve goals that were not fully specified in advance. The distinction from earlier robotic systems is not primarily about sensing capability or actuation precision; it is about the nature of the decision-making process. Classical industrial robots execute a sequence of predetermined movements with high repeatability and high accuracy in controlled environments where the input is predictable. Embodied AI systems, in principle, can form action plans for novel configurations of objects in environments they have not previously encountered.
This distinction matters enormously in food service contexts because kitchens are among the most physically unpredictable commercial environments that exist. The range of container shapes, bag types, and packaging configurations that a packing station encounters in a single shift exceeds the explicit programming capacity of any conventional robotic system. Building an exhaustive library of pre-programmed responses to every possible object configuration is not a tractable approach; the combinatorial space of possible inputs is simply too large. What is tractable, given sufficient training data and appropriate model architecture, is training a manipulation system to reason about novel configurations by analogy with configurations it has encountered before. That is what embodied AI flexible manipulation, at its core, is attempting to achieve.
The Transition From Rule-Based to Learning-Based Manipulation
The history of robotic manipulation in commercial environments can be read as a gradual relaxation of the constraint that the input must be completely predictable. First-generation industrial robots required parts to be presented in precisely specified orientations at precisely specified locations. Second-generation systems introduced structured sensing, typically machine vision, that allowed some variation in input position while still requiring objects to conform to a defined set of shapes and surface properties. The third generation, currently represented by early commercial deployments of embodied AI systems in sectors including logistics, e-commerce fulfillment, and food service, attempts to extend reliable manipulation performance to genuinely unstructured inputs: objects whose shape, orientation, and physical properties vary within a range broad enough that no explicit specification can capture it.
AtomBite.AI’s product architecture reflects an explicit commitment to this third-generation approach. The AtomBite Brain is not a collection of task-specific manipulation programs assembled into a library; it is a foundation model, which is to say a large-scale neural system trained across a distribution of manipulation tasks broad enough to produce general-purpose capabilities that transfer to novel scenarios. The foundation model paradigm, which demonstrated its transformative potential first in natural language processing and subsequently in computer vision, is now being applied to the physical action domain by a small number of research groups and early commercial ventures. AtomBite represents one of the more commercially focused implementations of this approach, with a product roadmap oriented specifically around the food service environment rather than the general-purpose manipulation challenges that dominate academic embodied AI research.
How Restaurant Automation Has Evolved: Three Structural Transitions
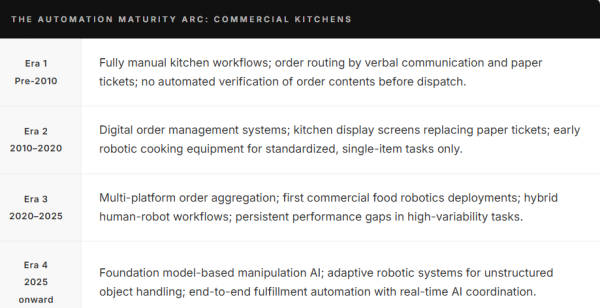
The evolution of automation in restaurant environments has followed a pattern shaped less by technology availability than by the specific characteristics of the tasks that operators most urgently needed to automate. The first wave of meaningful kitchen automation addressed the most tractable problems: those where the physical inputs were consistent and the operations were simple enough to be captured in explicit mechanical or software instructions. Espresso machines, automated fryers with programmable temperature and timing controls, and conveyor-based toasting systems all fall into this category. They reduced labor requirements for specific tasks while leaving the broader coordination and fulfillment workflow entirely in human hands.
The second wave, still ongoing in most commercial kitchen environments, introduced digital coordination layers: kitchen display systems, order aggregation software, and delivery platform integrations that improved the information flow within the kitchen without addressing the physical execution of fulfillment tasks. These systems reduced certain categories of communication error and provided operators with data on fulfillment performance that they previously lacked, but they did not fundamentally alter the labor dependency of the physical workflows they coordinated. A kitchen with a sophisticated digital order management system and a kitchen without one both ultimately require humans to open bags, place containers, verify contents, and seal orders.
The third wave, which is AtomBite.AI is positioned to participate in attempts to extend automation into the physical fulfillment layer that digital systems have until now only observed and coordinated. This transition is qualitatively different from the first two because it requires solving the manipulation problem in environments where the physical state of objects is not fully predictable, which is the problem that embodied AI research has been working toward for the past decade. The timing of this transition is being accelerated by two converging pressures: the sustained deterioration of labor availability in food service markets and the maturation of AI techniques that make adaptive manipulation commercially viable for the first time.
The market context for embodied AI deployment in food service is being shaped by a labor availability problem that has proven more structurally persistent than many industry observers anticipated when it first became acute in 2021 and 2022. With 4.1 million unfilled food service positions across North America as of late 2024 according to Bureau of Labor Statistics data, and with voluntary turnover rates in quick-service restaurant environments continuing to exceed 60 percent annually in most major markets, the economics of manual fulfillment workflows have become increasingly difficult to justify against the alternative of automation investment. This is the demand-side condition that makes the current moment a genuine commercial inflection point for embodied AI in food service rather than simply another cycle of technology promise.
The AtomBite Brain in the Context of AI Evolution
The AtomBite Brain is designed within this context as a manipulation foundation model that accumulates capability through deployment rather than through periodic manual updates. Each commercial installation generates manipulation data across the specific object configurations and environmental conditions of its host kitchen, and that data, appropriately anonymized and aggregated, feeds back into model training cycles that improve the system’s performance across the full deployment base. This feedback architecture is conceptually analogous to the improvement dynamic that has driven capability gains in large language models: a system deployed at scale in diverse real-world conditions learns from that diversity in ways that laboratory training alone cannot replicate.
The practical implication for restaurant operators is that the version of the AtomBite Brain deployed in year two of a subscription will perform meaningfully better than the version deployed in year one, without requiring the operator to purchase new hardware or renegotiate their service agreement. The improvement accrues as a function of the system’s exposure to real-world conditions across its full deployment base, and it is delivered continuously rather than in discrete upgrade cycles. This characteristic of learning-based manipulation systems represents a fundamental departure from the operational model of conventional robotics, where system capability is fixed at the time of installation and improvement requires either hardware replacement or significant software engineering investment.
“The future of food robotics depends on systems that learn from real-world experience rather than systems that simply execute what they were originally programmed to do. A manipulation model that improves continuously through deployment is a fundamentally different kind of infrastructure investment than anything the restaurant industry has previously been offered.”
Dr. Dong Wang, Co-Founder and Technical Lead, AtomBite. AI
The Roadmap From Single Task to Universal Manipulation
AtomBite.AI’s published product roadmap describes a progression that mirrors the way foundation models in other domains have extended their capabilities: by training on an expanding distribution of tasks and environments rather than by building separate specialist systems for each new use case. The M1 system targets takeout packing: a specific, bounded set of manipulation tasks performed at a specific station in the kitchen workflow. The planned M2 system extends the manipulation model’s training distribution to kitchen operation assistance tasks, which encompass a broader range of object types, preparation surfaces, and action sequences than the packing station alone. The M3 system addresses delivery handoff automation, adding the physical and social interactions involved in the transfer of a completed order to a driver.
Each successive product phase contributes to the AtomBite Brain’s training distribution in ways that make the overall system more generally capable. A model that has been trained on takeout packing across hundreds of restaurant concepts, kitchen operation assistance tasks across multiple cuisine formats, and delivery handoff interactions across a range of physical environments is building toward the kind of broad manipulation competence that the company has described, in longer-horizon terms, as a Universal Hand: a robotic manipulation system general enough to operate effectively across the full range of logistics and fulfillment tasks in commercial environments beyond food service.
Industry Perspective
The foundation model approach to robotic manipulation is being pursued by a small number of research-oriented companies globally, most of which are targeting general-purpose manipulation rather than specific commercial verticals. AtomBite.AI’s decision to build domain-specific commercial products first, accumulating real-world training data from a specific and well-defined operational context, reflects a deployment-first philosophy that prioritizes near-term commercial viability over maximum generality. Whether that sequencing produces a durable competitive advantage in the longer-term general manipulation market is a question the industry will answer over the next several years.
How This Evolution Reshapes the Stakeholders of Restaurant Automation
The long-term evolution of embodied AI in food service environments will produce consequences that extend well beyond the operational metrics of individual restaurants. For restaurant owners, particularly at the independent and mid-tier scale that has historically been underserved by automation technology, the maturation of subscription-based AI robotics creates a pathway to operational capability previously available only to enterprise operators with dedicated technology procurement budgets. A takeout packing robot offered at $2,200 to $2,900 per month with no capital expenditure requirement is accessible to a very different population of operators than a proprietary robotic system requiring a six-figure upfront investment.
For food delivery platforms, whose algorithmic ranking systems are built around fulfillment performance metrics, the broad adoption of AI-assisted packing verification represents a structural improvement in the data quality of the operator ecosystem they depend on. Platforms that have invested heavily in consumer-facing discovery and recommendation infrastructure are limited, ultimately, by the reliability of the fulfillment operations at the other end of the transaction. Improving that reliability through AI at the kitchen level benefits platform economics in ways that platform operators cannot achieve through their own product development alone.
For labor markets in food service, the trajectory is more complex. The near-term effect of packing station automation is a reduction in demand for a specific category of repetitive manual work that has historically been characterized by high turnover, limited skill development, and poor retention. The longer-term effect, as AI orchestration systems extend into kitchen preparation and management tasks, will depend on whether the productivity gains from automation translate into business growth that creates new categories of employment within the industry or into margin consolidation that does not. Historical evidence from automation adoption in other manufacturing and logistics sectors suggests that the aggregate employment effect is positive in industries with meaningful underlying demand growth, and the global food delivery market’s sustained trajectory provides that underlying condition.
An Assessment: Where the Field Actually Stands
The honest assessment of embodied AI in food service robotics in early 2026 is that the technology has crossed a threshold of commercial viability for specific, well-defined manipulation tasks while remaining substantially unproven in broader and more complex kitchen environments. The packing station represents the category’s current commercial frontier: a task complex enough to be meaningful, bounded enough to be tractable, and financially consequential enough to justify the investment required to deploy and operate AI-driven robotics at scale. Companies that can establish reliable performance in this category are building the manipulation training data and operational track record that subsequent, more ambitious deployments will require.
AtomBite.AI’s approach, centered on the AtomBite Brain as a continuously learning manipulation foundation model deployed through a subscription model that makes the technology accessible to a broad population of restaurant operators, represents a coherent and commercially grounded strategy for building toward the longer-term embodied AI vision its founders have articulated. The restaurant automation industry is not waiting for a single breakthrough; it is advancing through a sequence of increasingly capable systems, each of which is made possible by the data and operational experience accumulated by its predecessors. The packing station, unglamorous as it is, may well be where the future of food robotics is actually being built.